top of page
L.O.A.F Robotics








L.O.A.F Robotics
(Linear Ordinance Acquisition Facilitator)
April - August 2017
With fellow engineering students during the summer of 2017, we successfully created a fully autonomous robot, capable of navigating and retrieving objects!
See diagrams here: https://1drv.ms/b/s!AntpDbK7tZOagpsGtLyeqo8C3cGtew
See more at my github: https://github.com/MisterEddie/LOAF-Robotics








L.O.A.F Robotics: Photo Gallery
L.O.A.F CLAW ACTUATOR
A Collection of Claws
A Close up of Our Canada-Arm Style Claw

20170811_122453.jpg
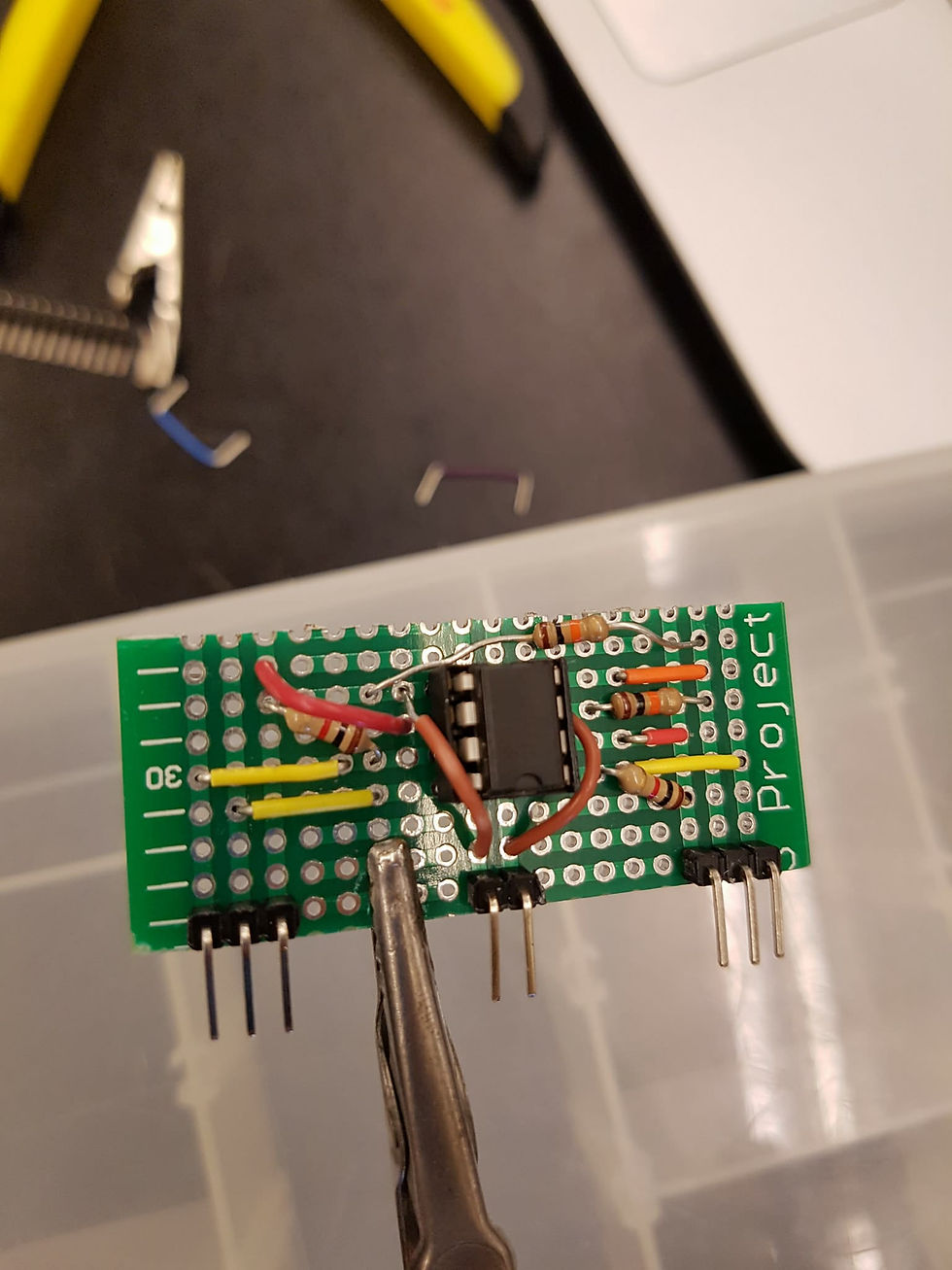
Sideview of Claw Mechanism

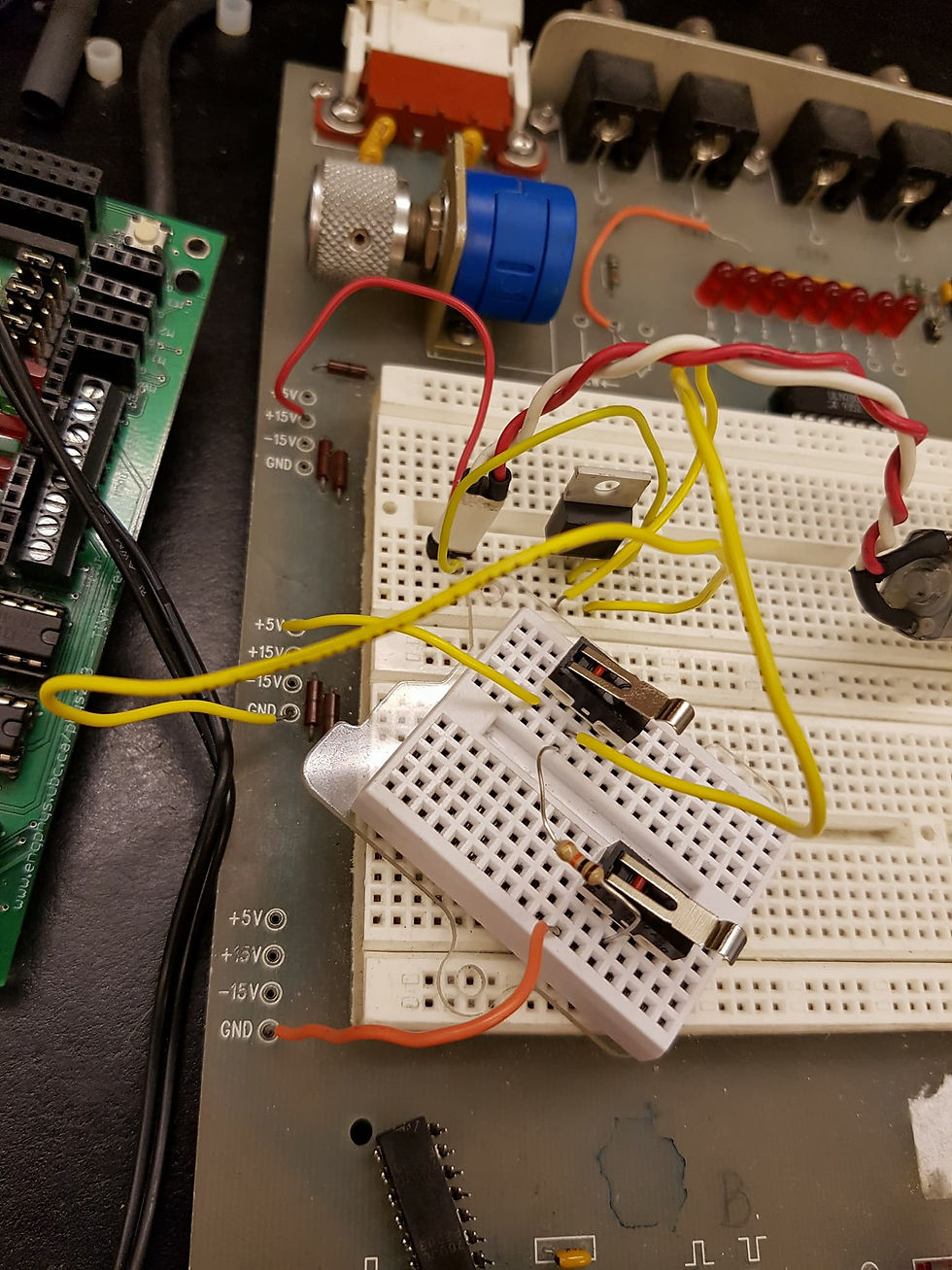
Claw Pulling Holding Basket with Pulley Mechanism

Early Claw Prototype

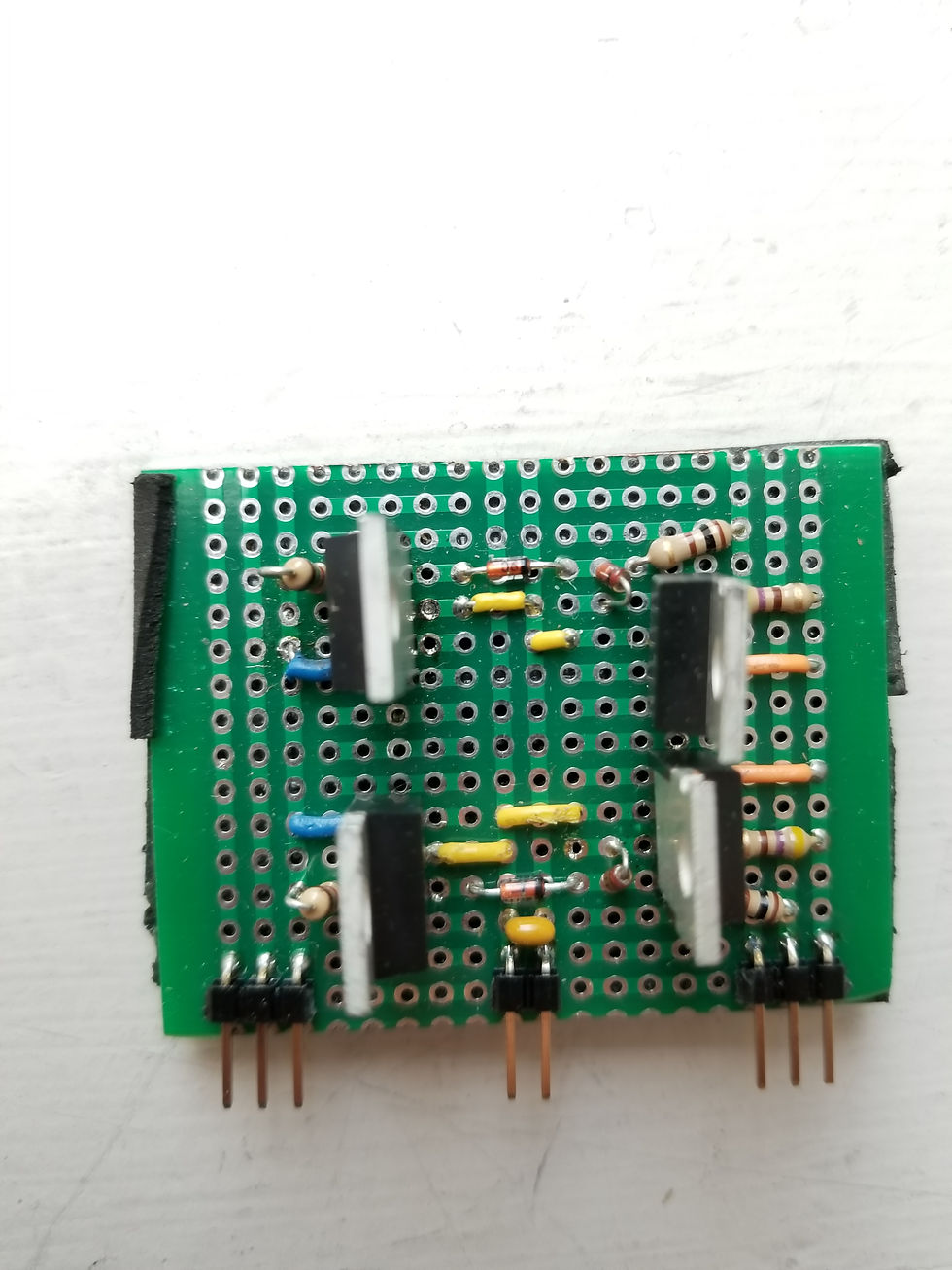
Front view of Base Claw Assembly

20170811_122432.jpg
Closeup View of Claw Motors
VIDEOS












bottom of page